









Thông tin luận án
Ngày 02-02-2016
Thông tin luận án của NCS. Nguyễn Thị Mai Hương
Tên đề tài luận án tiến sĩ: Nghiên cứu xây dựng thuật toán điều khiển dự báo theo mô hình cho đối tượng phi tuyến liên tục.
Chuyên ngành: Kỹ thuật điều khiển và Tự động hóa.
Mã số: 62.52.02.16
Khóa đào tạo: 2010 - 2014
Họ và tên nghiên cứu sinh: Nguyễn Thị Mai Hương.
Họ và tên người hướng dẫn khoa học: PGS. TS. Lại Khắc Lãi.
Đơn vị đào tạo: Trường Đại học Kỹ thuật Công nghiệp
Cơ sở đào tạo: Đại học Thái Nguyên
NHỮNG KẾT QUẢ MỚI CỦA LUẬN ÁN
Luận án đã có những đóng góp mới sau:
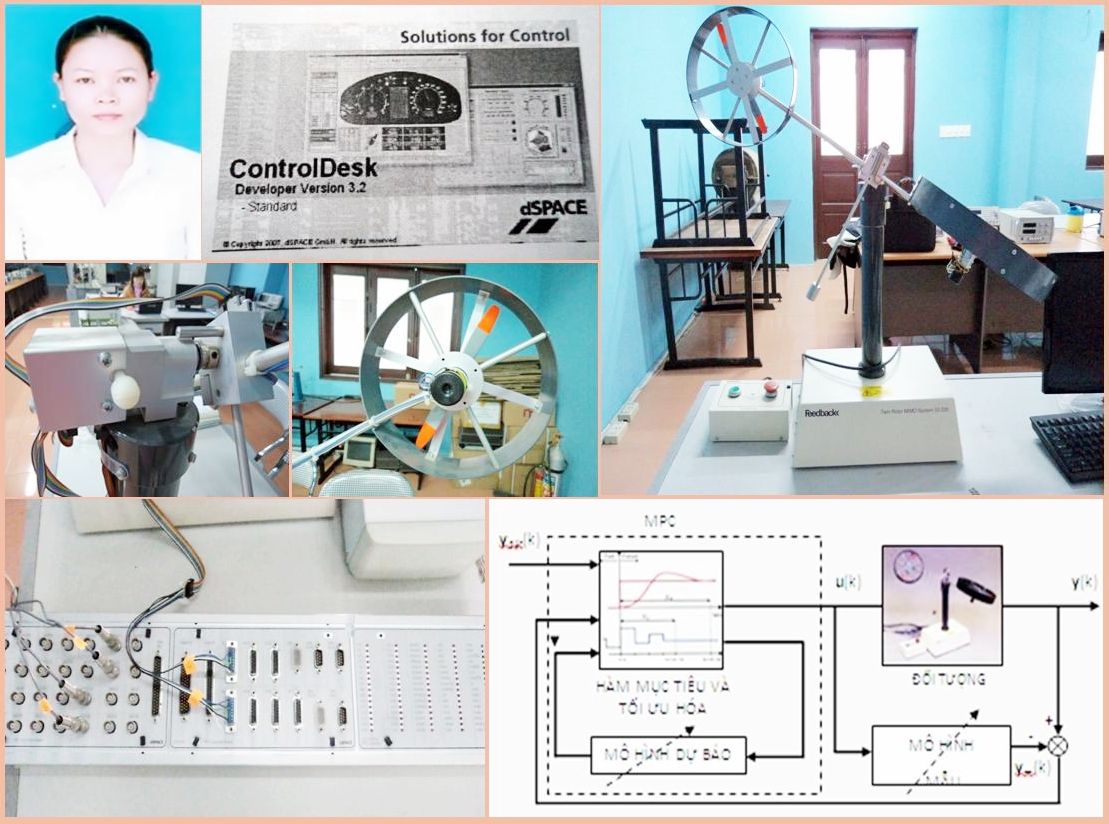
1. Bổ sung hoàn thiện thuật toán thiết kế bộ điều khiển dự báo sử dụng phương pháp quy hoạch phi tuyến để giải bài toán tối ưu trong chiến lược tối ưu hóa của điều khiển dự báo, mở rộng khả năng ứng dụng điều khiển dự báo vào điều khiển các đối tượng công nghiệp. Kết quả nghiên cứu được kiểm chứng bằng lập trình mô phỏng trên máy tính và thực nghiệm trên mô hình vật lý của hệ thống TRMS.
2. Xây dựng phương pháp luận để thiết kế bộ điều khiển dự báo cho hệ phi tuyến và đề xuất một giải pháp mới trong chiến lược tối ưu hóa của điều khiển dự báo hệ phi tuyến, cụ thể là: Điều khiển dự báo phi tuyến trên nền phương pháp biến phân, luận án đã phát biểu và chứng minh định lý về tính bám ổn định theo tín hiệu ra mẫu cho hệ phi tuyến liên tục khi cửa sổ dự báo tiến đến vô cùng. Kết quả nghiên cứu này đã khắc phục được các nhược điểm của các phương pháp giải bài toán tối ưu trên nền quy hoạch phi tuyến và rút ngắn được thời gian tính toán, nâng cao chất lượng điều khiển, mở rộng khả năng ứng dụng và cài đặt bộ điều khiển dự báo vào điều khiển các đối tượng thực.
3. Cài đặt thuật toán mới mà luận án đưa ra thông qua mô phỏng trên máy tính và thực hiện điều khiển trên mô hình vật lý tại phòng thí nghiệm Điện - Điện tử trường Đại học Kỹ thuật Công nghiệp - Đại học Thái Nguyên, thông qua đó đã kiểm chứng và khẳng định tính khả thi của thuật toán đề xuất.
KHẢ NĂNG ỨNG DỤNG TRONG THỰC TIỄN VÀ NHỮNG VẤN ĐỀ CẦN TIẾP TỤC NGHIÊN CỨU
* Khả năng ứng dụng trong thực tiễn:
+ Xây dựng phương pháp luận để thiết kế bộ điều khiển dự báo cho hệ phi tuyến và giải pháp chiến lược tối ưu hóa của điều khiển dự báo hệ phi tuyến.
+ Ứng dụng bộ điều khiển dự báo theo mô hình để điều khiển các đối tượng song tuyến, tiếp tục mở rộng điều khiển cho các đối tượng phi tuyến affine không dừng trong công nghiệp.
* Vấn đề cần tiếp tục nghiên cứu:
- Nghiên cứu hoàn thiện thêm các thuật toán đã đề xuất và triển khai ứng dụng điều khiển các hệ thống trong thực tế.
- Nghiên cứu đề xuất thêm các thuật toán mới có thời gian tính toán nhanh hơn.
INFORMATION OF DOCTORAL DISSERTATION
Dissertation title: Building Research model predictive control algorithms for continuous nonlinear objects.
Speciality: Automation & Control Engineering
Code: 62.52.02.16
Training course: 2010 - 2014
Ph.D candidate: Nguyen Thi Mai Huong.
Scientific supervisor: Assoc. Prof. Lai Khac Lai, PhD.
Training institution: College of Technology - Thai Nguyen University
THE NEW SCIENTIFIC FINDING
The dissertation has the following new contributions:
1. Additional improvement algorithms design predictive controller using nonlinear programming method in order to solve optimal problem in optimization strategy of predictive control, extending the applicability of predictive control to control the industrial objects. The study results are verified by simulating program on computers and experimented on physical models of specific TRMS system.
2. Develop a methodology to design predictive controller for nonlinear systems and propose a new solution in one optimization strategy of predictive control for nonlinear systems, namely: nonlinear predictive control based on variational method, dissertation speached and proved theorem about stable sticking follow the sample output signal for continuous nonlinear systems when the predictive window towards infinity. The results of this study overcome the disadvantages of the methods of solving optimal problem based on nonlinear programming and shorten calculating time, improve control quality, expand the applicability and install predictive controller to control the real objects.
3. Install a new algorithm that dissertation made via simulate on computer and implemented control on physical model at the Electric - Electronics Engineering Laboratory, College of Technology - Thai Nguyen University, through which verified and confirmed the feasibility of the proposed algorithm.
PRACTICAL APPLICABILITY AND THE NEEDS FOR FURTHER STUDIES
* Practical applicability:
+ Develop a methodology to design the nonlinear model predictive control and proposed a strategic solution for the optimization of the nonlinear model predictive control.
+ Applying the model predictive control to control the bilinear objects, continues to extend for controlling for continuous affine nonlinear objects in industrial.
* Issues needing for further studies:
+ Researching continue further refining the proposed algorithms and implemented control applications in real systems.
+ Study and propose further new algorithms having calculating time faster.







